Implementation
SLAM Nodes
There are three primary nodes for SLAM.
real_data_slam_node_gps
real_data_slam_node_no_gps
controls_sim_slam_node
The first two nodes are used to run on real data depending on whether we have GPS or not. The last node is used to test our SLAM implementation in-house with a rosbag recorded on our in-house controls sim.
Execution and Data flow
Where does iSAM2 run (CPU/GPU)?
The iSAM2 SLAM implementation runs entirely on the CPU. It is written in C++ and uses GTSAM, a CPU-optimized factor graph library. No GPU acceleration is used, as iSAM2 is designed for incremental updates that are efficient enough for real time execution on modern multi-core CPUs. Our SLAM nodes run within a ROS 2 Node written in C++ and leverage threading when available (through TBB), although much of the computation remains serial due to the incremental nature of the updates.
What is the data flow?
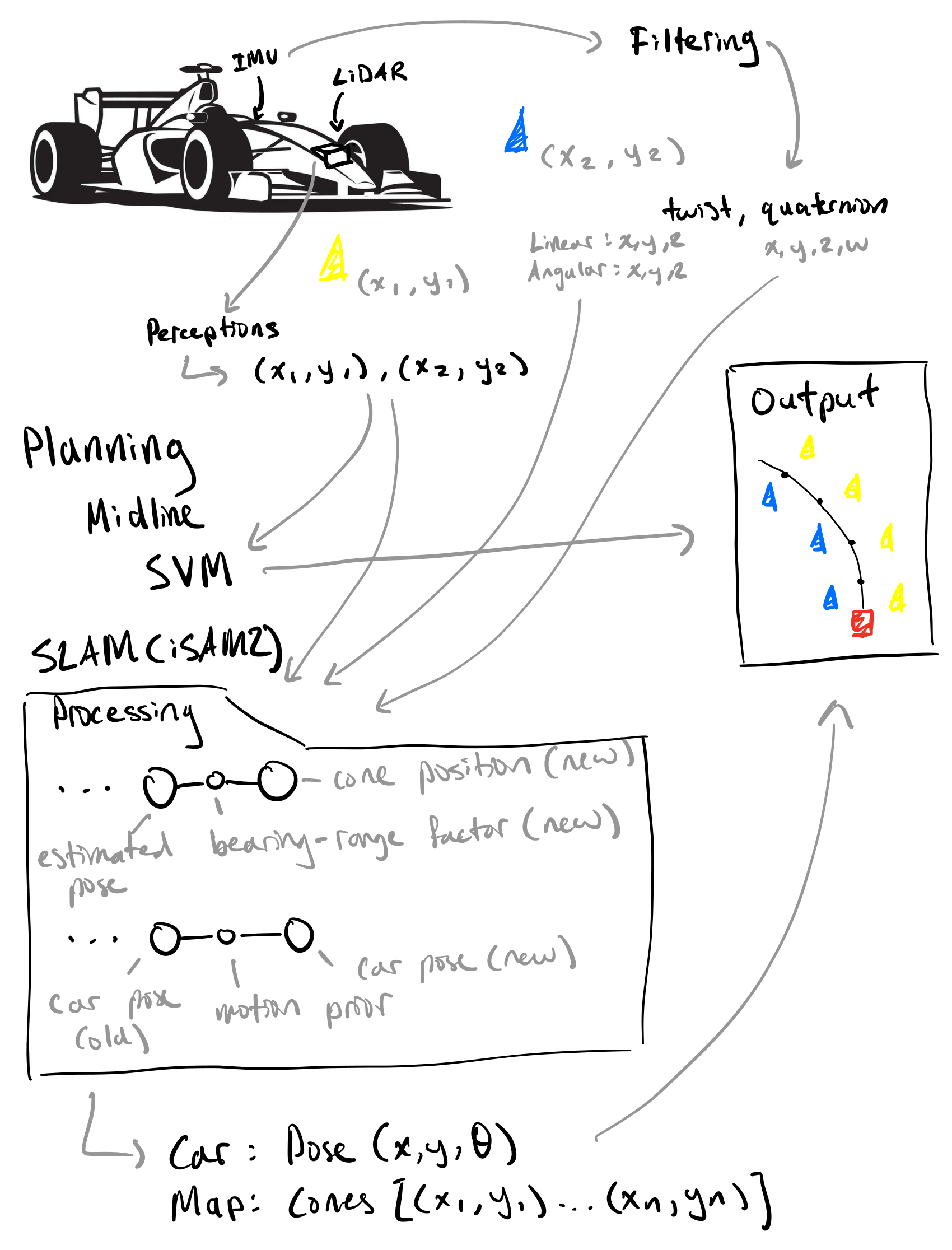
Input:
Cone observations from the perceptions pipeline (2D positions of blue/yellow cones)
IMU and velocity estimates
Processing:
Each cone observation is added as a bearing-range factor connecting the vehicle pose to cone landmarks
The current vehicle pose (if available) is added as a new variable in the Factor Graph
Motion priors are added between sequential poses (using IMU/velocity)
This information is fed into iSAM2 which incrementally updates the estimates of all previous poses and landmark (cone) positions
Output: